KVH C100 Flux Gate Compass
© Brooke Clarke 2009 - 2015Description
Photos
NDS Boxed C100
Factory C100-SE25
Description Boxed C100
Descriptiopn Factory C100-SE25
Related
Links
Background
This NDS boxed C100 showed up on eBay advertised as "KVH C100 Fluxgate Compass Engine / Heading Sensor Apps" by seller avitarunlimited. It contains the KVH C100 Flux Gate magnetic compass with the PCB mounted above the Flux Gate assembly.The box is labeled:
Heading Reference Unit
p/n: 1022-0100-0000
s/n: 0294
NDS Navigation Data Systems, Inc.
New Orleans, LA 70123, USA
(no CAGE number, as of 2009 NDS out of business)
Description
From the Analog Devices patent 5124648:
"A flux-gate magnetometer which employs three coils and one drive winding for two-axis sensing is marketed by KVH Industries, Inc., Middleton, R.I., as part of that company's KVH PC103 flux-gate compass and related products. According to KVH literature, its sensor uses a toroidal flux-gate magnetometer with a free floating ringcore in the center. The core is made of a stainless steel bobbin wound with Permalloy (a registered trademark) brand tape. A drive field is applied to the core and the external field interaction with the drive field produces an asymmetric change of core flux. This change in core flux is detected by a secondary winding over the core and the resultant signal is then processed."
Note the three coils (drive, X and Y) are fixed and the ring core floats in liquid.
The W.W.II vintage aircraft Flux Valve magnetic sensors that work with 3-phase Synchro systems also use a fluid floating system to keep the compass sensor level.
See Fig 3 on my Collins PN-101 web page
Photos
NDS Boxed C100
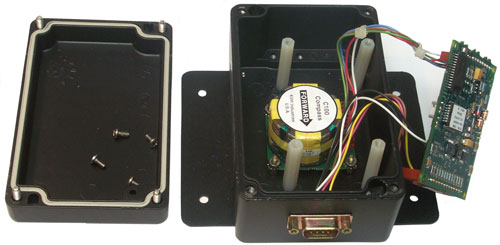 KVH C100 Flux Gate Compass in Nav Data Sys box |
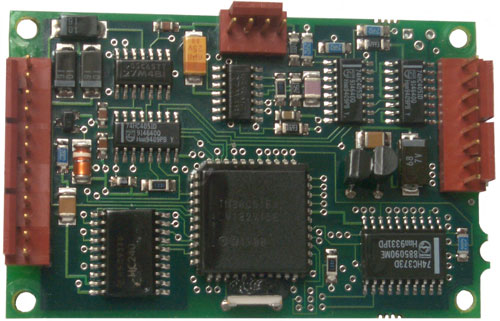 KVH C100 Flux Gate Compass PCB |
 KVH C100 Flux Gate Compass PCB |
 KVH C100 Flux Gate Compass Flug Gate |
Factory C100-SE25
Needs to be turned 90 deg CCW so sensor points up for use.
 |
 |
Description NDS boxed
The C100 has three I/O options that can use used depending on how it's wired.
The NDS box has brought out the RS-232 interface and ignored the analog and TTL digital interfaces.
Wiring Table
| KVH |
NDS DB-9m |
Computer DB-9 |
||
| RS-232
Serial I/O |
nc:
4, 6, 9 |
|||
| Pin |
Description |
|||
| P2-4 |
RxD
TTL level RS-232 |
Yel |
5 |
3 |
| P2-11 |
TxD TTL level RS-232 | Pink |
3 |
2 |
| P2-12 |
Inverted TxD TTL level RS-232 | Tan |
8 |
|
| P2-6 |
Gnd | Blk |
7 |
5 |
| TTL Digital I/O |
||||
| P2-10 |
10
kHz Clock out |
Blu |
||
| P2-9 |
Data
out |
Wht |
||
| P2-8 |
Strobe
Input (starts meas) |
Gry |
||
| Analog Outputs |
||||
| P2-3 |
Sin |
Org |
||
| P2-2 |
Cos |
Red |
||
| P2-1 |
Ref |
Brn |
||
| P2-5 |
Gnd |
Grn |
||
| P2-7 | Factory Test | |||
| DC Power Input |
||||
| P1-2 |
"12
Volt" in |
Wht |
1 |
Ext
P.S. |
| P1-1 |
"24
Volt" in |
Red |
2 |
Ext
P.S. |
| P1-4 |
Gnd |
Blk |
||
Description Factory C100-SE25
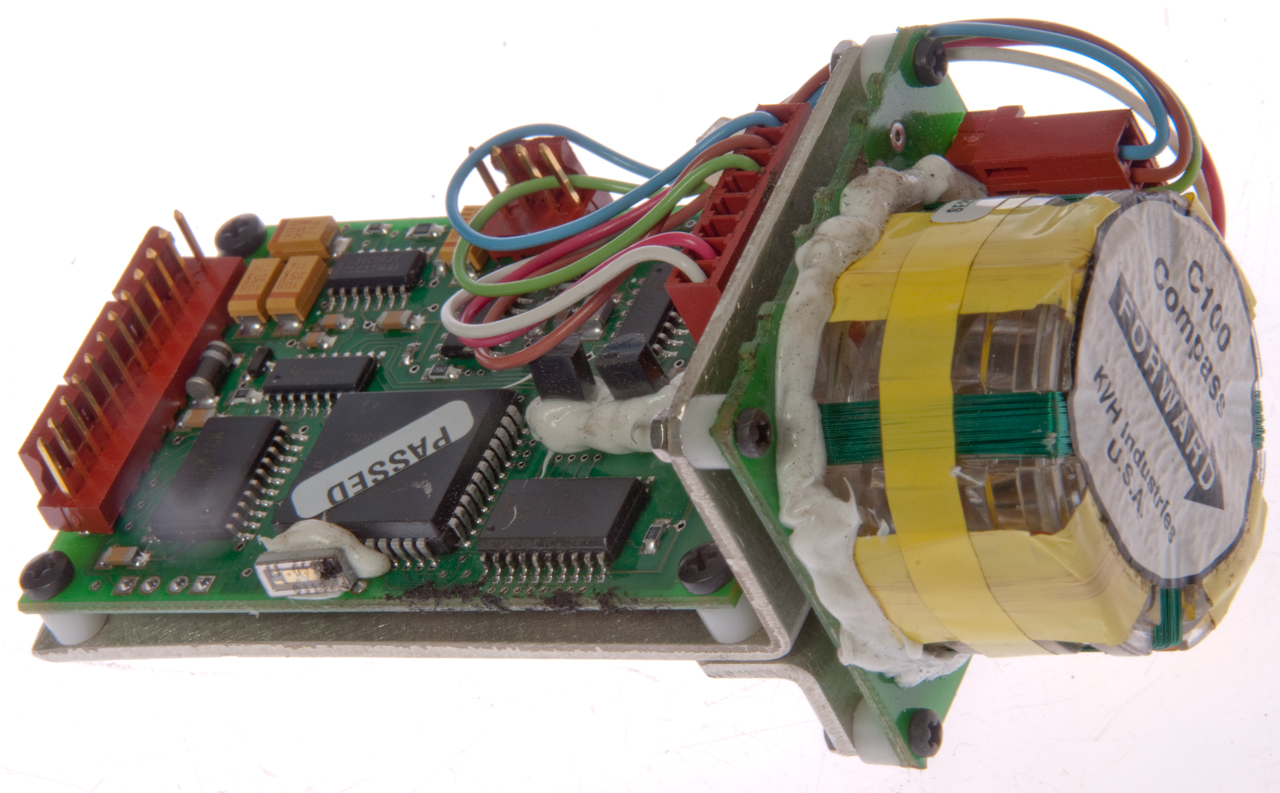
There are two main components: the fluxgate sensor and the PCB with the electronics. In this unit the PCB is mounted on an "L" shaped piece of aluminum so that the fluxgate sensor has it's centerline parallel to the PCB. When mounted in a box the the sensor typically has it's centerline perpendicular to the PCB.
There are three variants of the C100 that depend on how they handle the vertical component of the Earth's magnetic field.
NOTE the top of the sensor, marked FORWARD, must be pointing up so that the fluid floated ring core can float.
SE25 is the raw sensor and can handle +/- 16 degrees of tilt from level by means of a "floating ring core".
SE15 adds gimbals to support the sensor and can handle +/- 30 degrees
SE10 adds gimbals to support the sensor and can handle +/- 45 degrees
The resolution is 0.1 degrees with an accuracy spec of 0.5 degrees when the SE25 operated within the +/- 16 degrees of tilt.
Note there are numerous digital and analog outputs, but an RS-232 serial interface is needed to setup the analog outputs which may be:
An as received C100 might have any one of the above analog modes activated.
- SIN and COS plus a zero reference voltage of 1.5 or,
- Linear 5mv per degree ramp or,
- Hysteresis Linear 5MV per degree ramp (4 degrees of Hysteresis around 0/360 degrees)
Related
AC_D500 Astro-Compass MkII (manual star/Sun tracker)
Aircraft Pilot's Standby Magnetic Compass
Chinese Compass & Sundial
DAGR - Defense Advanced GPS Receiver - has built-in magnetic compass (no tilt corrections) and the World Magnetic Model (GPS knows date & location so can display either Magnetic or True bearings)
DC Gaussmeter Model 1
AMY6 Magnetic Polarity Tester
GE Gauss Meter & Reference Magnet
E_Mag Experiment Relating to the Vertical Component of the Earth's Field using digital wrist compass
Fluxgate (& other) Patents - as far as I can tell KVH does not have any patents on the C100 but does have plenty on Fiber Optic Gyroscopes (Wiki).
HT20 2000 mT Magnetic Flux Meter
MC1 Magnetic Compass Calibration Set similar to AN/ASM-344
MD1 Automatic Astro Compass Type MD-1 (automatic Star Tracker)
North Finding
Sensors - Magnetic
SSQ-53 Sonobuoy (includes a magnetic compass function)
Links
Back to Brooke's Products for Sale, Sensors, Navigation, Military Information, Home page
[an error occurred while processing this directive] page created 5 Oct 2009.